<< Back to the Little Box blog
The first prototype for Little Box project was building a system that can open a box seamlessly. This is a main step for the box and most of the next steps will be shaped according to our solution for this problem.
We needed to make this system seamless, with low noise and small parts. We started with ordering these parts
Stepper Motors from Sparkfun.com (http://www.sparkfun.com/products/9238)

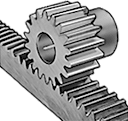
Steel Plain Bore 14-1/2 Degree Spur Gear, 24 Pitch, 12 Teeth, 0.5″ Pitch Diameter, 1/4″ Bore from mcmaster.com (http://www.mcmaster.com/#catalog/118/1070/=gljjtx)
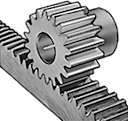
Steel 14-1/2 Degree Pressure Angle Gear Rack, 24 Pitch, 1/4″ Face Width, 1/4″ H Overall, 2′ Length from mcmaster.com (http://www.mcmaster.com/#catalog/118/1070/=gljkky)
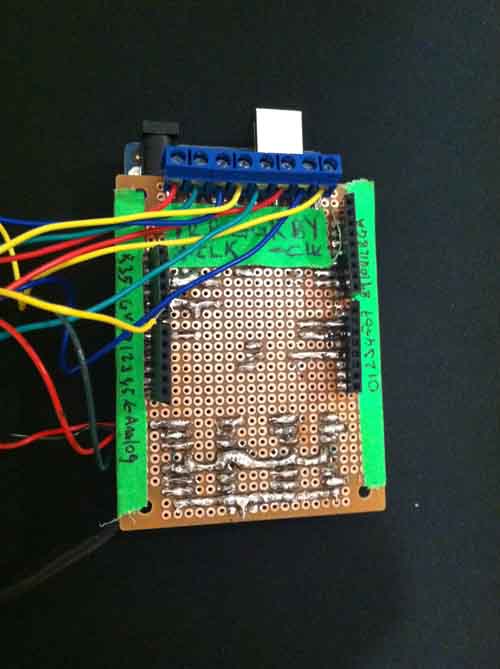
Other than these we used an Arduino Uno microcontroller (arduino.cc)
We tried all of these parts with different setups and materials. Since we are pushing the lid very close to the hinges, some of these materials were not able to handle the force that we needed or they were very noisy, such as servo motors.
We ended up using 2 steppers on both sides of the back of the box and steel plain bore 14-1/2 degree spur gear. We also made our own gears for stepper motors to drive this geared rod.
While figuring out the materials it is very important to keep in mind physical laws. We ended up using torque equation. You can find more details in this page (http://hyperphysics.phy-astr.gsu.edu/hbase/extms.html)
Firstly we calculated how much force we are applying to the lid. Our stepper motors holding torque is 2.3kg*cm and our gears radius is 0.5cm. So if we multiply these 2 variables our force is 1.15 kg. This means if we position our set up very close to the lid, lets say the distance is 2 cm, and the weight of the lid is 0.45 kg, we can push the lid and make it rotate from the hinge.
1.15 kg * 2cm > 0.45kg * 5cm(center of gravity for the lid)
2.30kg*cm > 2.25kg*cm
Also, since we used 2 motors to push from both left and right side of the lid, we multiplied our force by 2. (These calculations are estimated, and we didn’t factor in forces like friction).
As a result, if we need to increase the weight of the lid and decrease the distance from the hinge, we need to make more specific calculations and find a motor with more torque.
Also, we accomplished some extra steps and we add more materials in to the box. We used a strip of RGB Leds (http://www.adafruit.com/products/346)

and sonar sensors (http://www.sparkfun.com/products/9491)

This first prototype serves as proof of concept. Next steps will be deciding on materials, figuring out motor torque accordingly and lowering the noise as much as possible.
As for the materials, the original choice was to use Corian. After receiving some samples of the material we realized that it’s very heavy and might not be an appropriate material for this application, unless we choose to go with a much larger motor. This could mean that we’d get more sound, though, so we have to balance aesthetics with mechanics and physics.
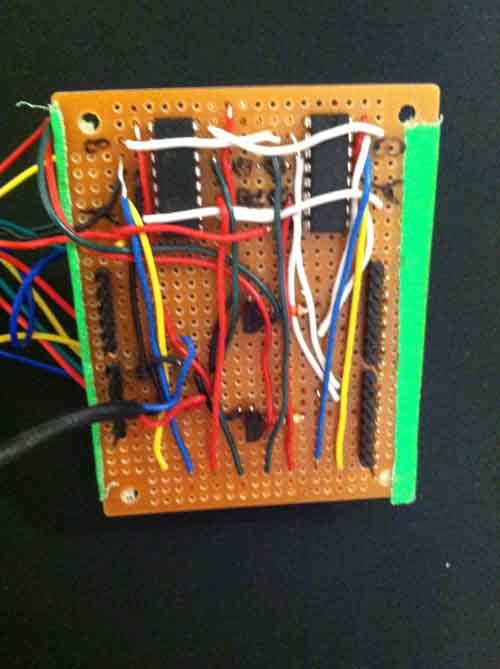
Here are some pictures and videos from our set up:
")
")